 We present a self-supervised approach for learning local geometric features for 3D point clouds. Our model acheives this by learning to predict the displacement to the next point in a Z-ordered sequence.
We present a self-supervised approach for learning local geometric features for 3D point clouds. Our model acheives this by learning to predict the displacement to the next point in a Z-ordered sequence.
Abstract
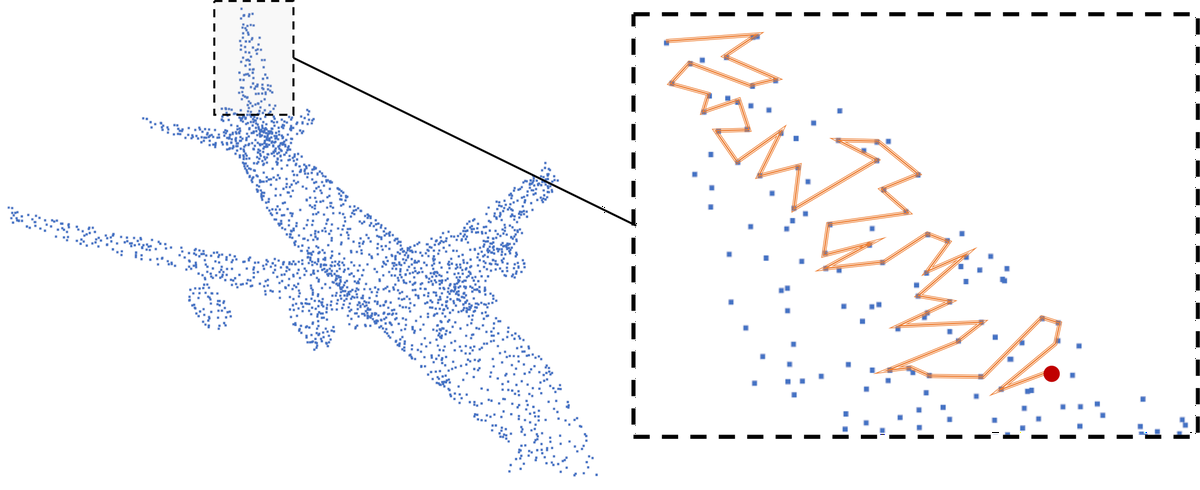
We present a self-supervised task on point clouds, in order to learn meaningful point-wise features that encode local structure around each point. Our self-supervised network, operates directly on unstructured/unordered point clouds. Using a multi-layer RNN, our architecture predicts the next point in a point sequence created by a popular and fast Space Filling Curve, the Morton-order curve. The final RNN state (coined Morton feature) is versatile and can be used in generic 3D tasks on point clouds. Our experiments show how our self-supervised task results in features that are useful for 3D segmentation tasks, and generalize well between datasets. We show how Morton features can be used to significantly improve performance (+3% for 2 popular algorithms) in semantic segmentation of point clouds on the challenging and large-scale S3DIS dataset. We also show how our self-supervised network pretrained on S3DIS transfers well to another large-scale dataset, vKITTI, leading to 11% improvement.
BibTex
@InProceedings{Thabet_2020_CVPR_Workshops,
author = {Thabet, Ali and Alwassel, Humam and Ghanem, Bernard},
title = {Self-Supervised Learning of Local Features in 3D Point Clouds},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR) Workshops},
month = {June},
year = {2020}
}